



Automatiserad planering och koordination av autonoma fordon i underjordsgruvor
fullscale
Örebro universitet
2020-05-01
Epiroc, Newcrest Mining
Federico Pecora
2023-04-30
201804622
Syfte och mål
Av alla moment i en underjordsgruva utgör transporter av bergsmassor genom tunnlar en större del. Detta utförs av LHD (Load Haul Dump) maskiner vilka är utrustade men en skopa som kan transportera flera ton material. Nuvarande tillvägagångsätt är att manuellt planera hur LHD-maskinerna körs där dessa är styrda av operatörer. Detta projekt avser att utveckla AI metoder för att planera och koordinera en flotta av LHD-maskiner. Dessa metoder kommer att underlätta två aspekter: (1) planering av uppdrag, utförande och övervakning av utförandet; samt (2) systemdesign och igångkörning.
Förväntade effekter och resultat
Vi kommer att utveckla prototyper som kan vidareutvecklas till fullskaliga produkter med ett mål att ha TRL7 för dessa demonstratorer i slutet av projektet. Projektet kommer direkt, samt även mätbart, medverka till flera långsiktiga mål i SIP-STRIM´s agenda; att förbättra metoder och processer inom gruvindustrin, utveckla kontinuerliga processer, färre mantimmar per ton malm, komplett fjärrstyrda gruvor, samt robustare och mer pålitliga gruvmaskiner.
Planerat upplägg och genomförande
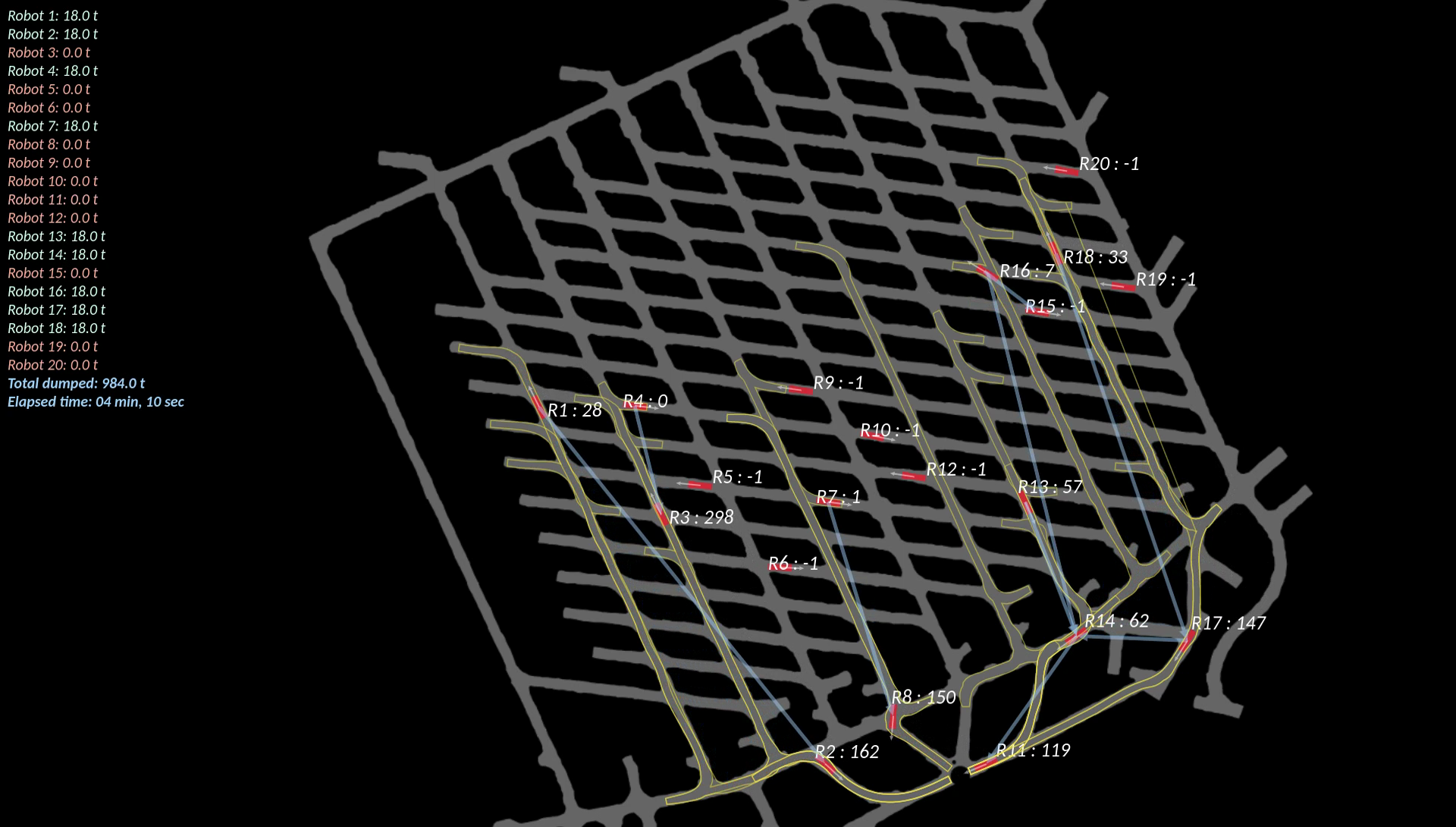
Verktyg för planering av uppdrag, utförande och övervakning av utförandet (1) kommer att baseras på ett befintligt metod för multi-robotkoordinering, rörelseplanering och kontroll utvecklad vid Örebro universitet. Metoden kommer att utökas för att garantera frånvaron av dödlägen. En optimeringsprocess för beräkning av effektiva uppdragstilldelningar kommer också att utvecklas och integreras. Systemdesign- och distributionsverktyget (2) kommer att byggas på en 2D-simuleringsmotor utvecklad vid Örebro universitet.
Mer information
Presentation from Swedish Mining Innovation Program day 2020
Picture rights: F. Pecora, Örebro University /Newcrest Mining